



สเต็ปเปอร์ไดรฟ์แบบวงปิด 2 เฟสควบคุมพัลส์ T60Plus


การแนะนำผลิตภัณฑ์



การเชื่อมต่อ

คุณสมบัติ
| แหล่งจ่ายไฟ | 18~48VDC |
| ควบคุมความแม่นยำ | 4000 พัลส์/รอบ |
| โหมดพัลส์ | ทิศทางและพัลส์, พัลส์คู่ CW/CCW, พัลส์ควอดราเจอร์ A/B |
| การควบคุมปัจจุบัน | อัลกอริทึมการควบคุมเวกเตอร์เซอร์โว |
| การตั้งค่าการแบ่งย่อย | การตั้งค่าสวิตช์ DIP 15 ตัวเลือก (หรือการตั้งค่าซอฟต์แวร์แก้ไขข้อบกพร่อง) |
| ช่วงความเร็ว | แบบธรรมดา 1200~1500rpm สูงสุด 4000rpm |
| การระงับการสั่นพ้อง | การคำนวณจุดเรโซแนนซ์อัตโนมัติเพื่อระงับการสั่นสะเทือนความถี่กลาง |
| การปรับพารามิเตอร์ PID | ซอฟต์แวร์ดีบักเพื่อปรับคุณลักษณะ PID ของมอเตอร์ |
| ตัวกรองพัลส์ | ตัวกรองสัญญาณดิจิตอล 2MHz |
| เอาท์พุตสัญญาณเตือน | เอาต์พุตสัญญาณเตือนสำหรับกระแสเกิน, แรงดันไฟเกิน, ข้อผิดพลาดของตำแหน่ง ฯลฯ |
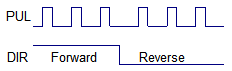
โหมดพัลส์
อินเทอร์เฟซสัญญาณของไดรฟ์ซีรีส์ T มาตรฐานมีรูปร่างเป็นพัลส์ และ T60PLUS V3.0 สามารถรับสัญญาณคำสั่งพัลส์ได้สามประเภท
| พัลส์และทิศทาง (PUL + DIR) |
|
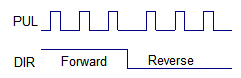
| พัลส์คู่ (CW + CCW) |
|
| พัลส์ตั้งฉาก (A/B พัลส์ตั้งฉาก) | 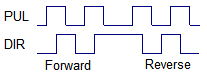 |
การตั้งค่าไมโครสเต็ปปิ้ง
| พัลส์/เรฟ | SW1 | SW2 | SW3 | SW4 | หมายเหตุ |
| 3600 | on | on | on | on | สวิตช์ DIP จะถูกเปลี่ยนเป็นสถานะ "3600" และซอฟต์แวร์ทดสอบสามารถเปลี่ยนการแบ่งย่อยอื่นๆ ได้อย่างอิสระ |
| 800 | ปิด | on | on | on | |
| 1600 | on | ปิด | on | on | |
| 3200 | ปิด | ปิด | on | on | |
| 6400 | on | on | ปิด | on | |
| 12800 | ปิด | on | ปิด | on | |
| 25600 | on | ปิด | ปิด | on | |
| 7200 | ปิด | ปิด | ปิด | on | |
| 1,000 | on | on | on | ปิด | |
| 2000 | ปิด | on | on | ปิด | |
| 4000 | on | ปิด | on | ปิด | |
| 5,000 | ปิด | ปิด | on | ปิด | |
| 8000 | on | on | ปิด | ปิด | |
| 10,000 | ปิด | on | ปิด | ปิด | |
| 20000 | on | ปิด | ปิด | ปิด | |
| 40000 | ปิด | ปิด | ปิด | ปิด |
การตั้งค่าไมโครสเต็ปปิ้ง
ขั้วไดรฟ์ไหม้หรือเปล่า?
1. หากมีไฟฟ้าลัดวงจรระหว่างขั้ว ให้ตรวจสอบว่าขดลวดมอเตอร์มีไฟฟ้าลัดวงจรหรือไม่
2. หากความต้านทานภายในระหว่างขั้วมีค่ามากเกินไป โปรดตรวจสอบ
3. หากมีการบัดกรีมากเกินไป ให้เพิ่มการเชื่อมระหว่างสายไฟเพื่อสร้างลูกบัดกรี
ไดรฟ์สเต็ปเปอร์แบบวงปิดมีสัญญาณเตือนหรือไม่?
1. หากมีข้อผิดพลาดในการเชื่อมต่อสายตัวเข้ารหัส โปรดตรวจสอบให้แน่ใจว่าใช้สายต่อขยายตัวเข้ารหัสที่ถูกต้อง หรือติดต่อ Rtelligent หากคุณไม่สามารถใช้สายต่อขยายได้ด้วยเหตุผลอื่น
2. ตรวจสอบว่าตัวเข้ารหัสเสียหายหรือไม่ เช่น สัญญาณเอาต์พุต
-
 คู่มือผู้ใช้ Rtelligent T60PLUS V3.0
คู่มือผู้ใช้ Rtelligent T60PLUS V3.0




