ไดรฟ์สเต็ปเปอร์แบบวงปิด 2 เฟสควบคุมพัลส์ T42


การแนะนำผลิตภัณฑ์



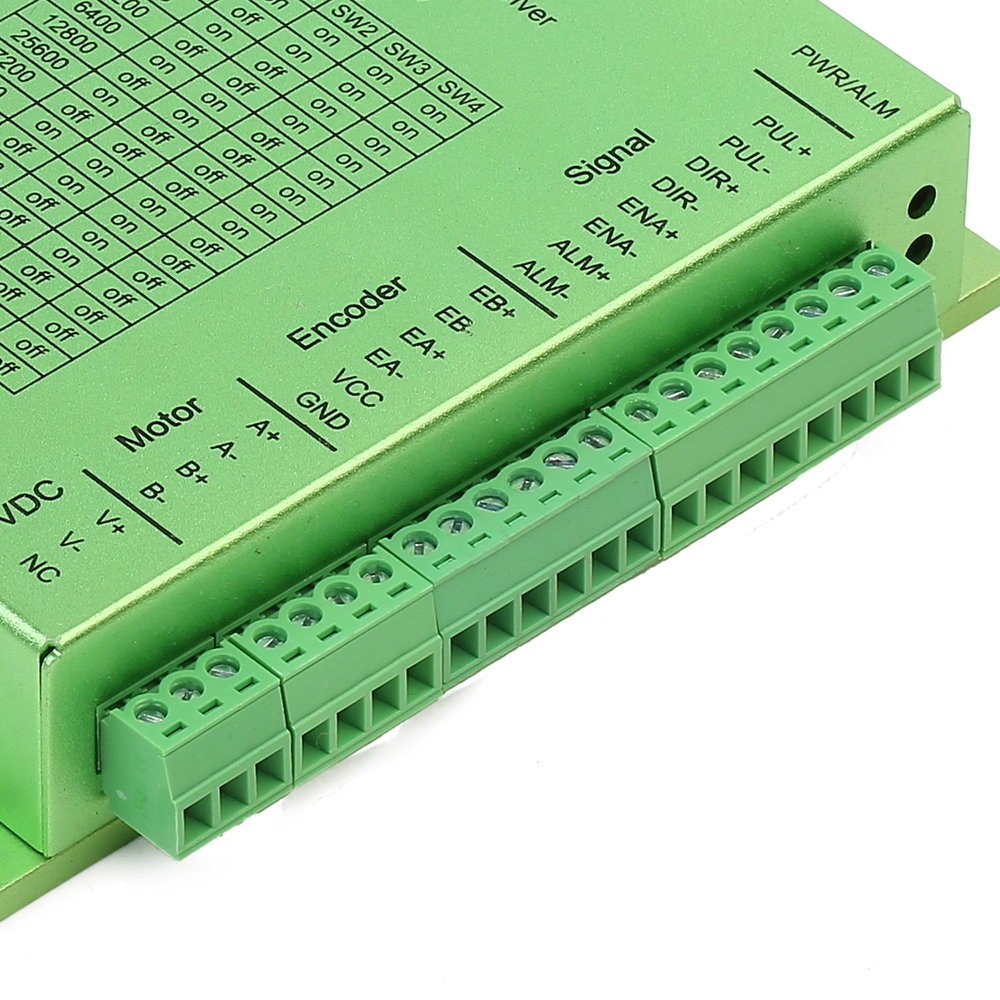
การเชื่อมต่อ

คุณสมบัติ
| แหล่งจ่ายไฟ | 18 –68 โวลต์ดีซี |
| ควบคุมความแม่นยำ | 4000 พัลส์/รอบ |
| โหมดพัลส์ | ทิศทางและพัลส์, พัลส์คู่ CW/CCW |
| การควบคุมปัจจุบัน | อัลกอริทึมการควบคุมเวกเตอร์เซอร์โว |
| การตั้งค่าไมโครสเต็ปปิ้ง | การตั้งค่าสวิตช์ DIP 15 ตัวเลือก (หรือการตั้งค่าซอฟต์แวร์แก้ไขข้อบกพร่อง) |
| ช่วงความเร็ว | แบบธรรมดา 1200 ~ 1500 รอบต่อนาที สูงสุด 4000 รอบต่อนาที |
| การระงับการสั่นพ้อง | คำนวณจุดเรโซแนนซ์อัตโนมัติและยับยั้งการสั่นสะเทือน IF |
| การปรับพารามิเตอร์ PID | ซอฟต์แวร์ทดสอบเพื่อปรับคุณลักษณะ PID ของมอเตอร์ |
| การกรองพัลส์ | ตัวกรองสัญญาณดิจิตอล 2MHz |
| เอาท์พุตสัญญาณเตือน | เอาต์พุตแจ้งเตือนกระแสเกิน แรงดันไฟเกิน ตำแหน่งผิดพลาด ฯลฯ |
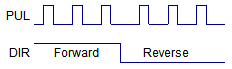
โหมดพัลส์
อินเทอร์เฟซสัญญาณไดรเวอร์ซีรีส์ T มาตรฐานมีรูปแบบเป็นพัลส์ และ T60 สามารถรับสัญญาณคำสั่งพัลส์ได้สองประเภท
| พัลส์และทิศทาง (PUL + DIR) |
|
| พัลส์คู่ (CW + CCW) | 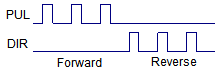 |
การตั้งค่าไมโครสเต็ปปิ้ง
| พัลส์/เรฟ | SW1 | SW2 | SW3 | SW4 | หมายเหตุ |
| 3600 | on | on | on | on | สวิตช์ DIP จะถูกเปลี่ยนเป็นสถานะ "3600" และซอฟต์แวร์ทดสอบสามารถเปลี่ยนการแบ่งย่อยอื่นๆ ได้อย่างอิสระ |
| 800 | ปิด | on | on | on | |
| 1600 | on | ปิด | on | on | |
| 3200 | ปิด | ปิด | on | on | |
| 6400 | on | on | ปิด | on | |
| 12800 | ปิด | on | ปิด | on | |
| 25600 | on | ปิด | ปิด | on | |
| 7200 | ปิด | ปิด | ปิด | on | |
| 1,000 | on | on | on | ปิด | |
| 2000 | ปิด | on | on | ปิด | |
| 4000 | on | ปิด | on | ปิด | |
| 5,000 | ปิด | ปิด | on | ปิด | |
| 8000 | on | on | ปิด | ปิด | |
| 10,000 | ปิด | on | ปิด | ปิด | |
| 20000 | on | ปิด | ปิด | ปิด | |
| 40000 | ปิด | ปิด | ปิด | ปิด |
-
 คู่มือผู้ใช้ Rtelligent T42
คู่มือผู้ใช้ Rtelligent T42